Infanoid is an upper-torso humanoid with the size of 3 to 4 year-old human children. The height from the table top, on which Infanoid is mounted, is about 480mm; the total weight is about 15kg. As illustrated below, Infanoid has 23 DOFs and another 6 DOFs (for eyebrows and fingers, which are not shown in the figure); the total 29 DOFs produce life-like and human-like movements.

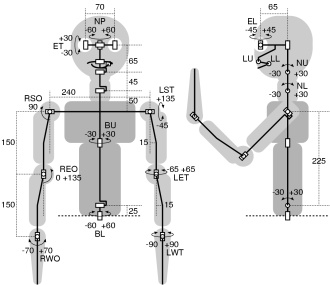
The table blow describes the motion range, actuator specification, and final reduction ratio (after the actuator output; therefore, the total reduction ratio will be, for instance, 67.49×5.0). Note that positive direction is (1) to the right for EL, ER, NP, BL, BU, (2) to the floor for ET, NU, NL, BO, BI, LST, RST, BT, and (3) to open or outward for other DOFs.
Most of Infanoid's DOFs are actuated by DC motors through wires and pulleys; exceptions are LU (DC motor + spur gears), LL (DC motor direct drive), NU/NL (DC motor + timing belt + Harmonic Drive), BT (DC motor + worm gear), BO/BI (RC-servo + cam = linear motion), LHF/LHI/RHF/RHI (RC-servo + tendon/spring = contraction/expansion).
| mnemonic | name | range (deg) |
motor/ratio | final ratio |
|---|---|---|---|---|
| EL | eye-left | −45…45 | maxon RE13 1.5W, GP13A 67.49 | 2.250 |
| ER | eye-right | −45…45 | maxon RE13 1.5W, GP13A 67.49 | 2.250 |
| LU | lip-upper | −15…15 | maxon RE13 1.5W, GP13A 67.49 | 5.000 |
| LL | lip-lower | −40…40 | maxon RE10 0.75W, GP10A 64 | 1.000 |
| ET | eye-tilt | −30…30 | maxon RE13 3W, GP13A 67.49 | 2.500 |
| NP | neck-pan | −60…60 | maxon RE13 3W, GP13A 67.49 | 5.000 |
| NU | neck-upper | −30…30 | maxon Amax-22 5W, pulley 3.333 | 100 |
| NL | neck-lower | −30…30 | maxon Amax-22 5W, pulley 3.333 | 100 |
| BO | brow-outer | −35…35 | RC-servo | |
| BI | brow-inner | −35…35 | RC-servo | |
| LET | l-elbow-turn | 0…135 | HDS RH-5A, 80 | 4.400 |
| LEO | l-elbow-open | 0…135 | HDS RH-5A, 80 | 3.429 |
| LWT | l-wrist-turn | −90…90 | maxon RE13 3W, GP13A 67.49 | 3.733 |
| LWO | l-wrist-open | −60…60 | maxon RE13 3W, GP13A 67.49 | 3.333 |
| LHF | l-hand-fingers | −35…35 | RC-servo | |
| LHI | l-hand-index | −35…35 | RC-servo | |
| RET | r-elbow-turn | 0…135 | HDS RH-5A, 80 | 4.400 |
| REO | r-elbow-open | 0…135 | HDS RH-5A, 80 | 3.429 |
| RWT | r-wrist-turn | −90…90 | maxon RE13 3W, GP13A 67.49 | 3.733 |
| RWO | r-wrist-open | −60…60 | maxon RE13 3W, GP13A 67.49 | 3.333 |
| RHF | r-hand-fingers | −35…35 | RC-servo | |
| RHI | r-hand-index | −35…35 | RC-servo | |
| LST | l-shoulder-turn | −45…135 | HDS RH-8, 50 | 5.500 |
| LSO | l-shoulder-open | 0…90 | HDS RH-8, 50 | 3.875 |
| RST | r-shoulder-turn | −45…135 | HDS RH-8, 50 | 5.500 |
| RSO | r-shoulder-open | 0…90 | HDS RH-8, 50 | 3.875 |
| BT | body-tilt | −30…30 | HDS RH-8, 50 | 25.00 |
| BL | body-lower | −60…60 | HDS RH-5A, 80 | 9.133 |
| BU | body-upper | −30…30 | HDS RH-5A, 80 | 5.600 |
The power supplies to the motors are (1) DC12V for maxon motors and HDS RH-5A, (2) DC24V for other DC motors, and (3) DC5V to RC-servos.
- maxon: maxon motor ag (Switzerland)
- HDS: Harmonic Drive Systems Inc.
- JR: Japan Remote Control Co.,LTD
Under construction. For details of the software running on the motion controller (Pico-2), please take a look at ClayBot description.