Keepon is quite a unique robot, which resembles a chick (or marshmallow peep) or a yellow snowman. Keepon has two eyes (color CCD video cameras) and a nose (microphone) on its silicone-rubber skin, giving us comprehensive appearance to interact with.
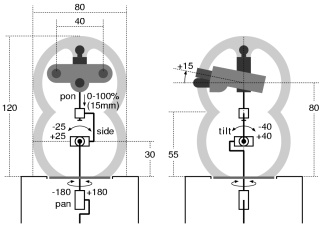
Keepon has four degrees of freedom. Namely, "pan" (shaking: yaw) and "tilt" (nodding: pitch) for expressing the direction of Keepon's attention. In addition, "side" (tilting sideways: roll) and "pon" (bobbing: vertical shrink/stretch) for expression the content of Keepon's emotion. Note that the emotive expressions can be done without changing the attentive posture, so that you may think that Keepon has some states of mind towards the target of attention.

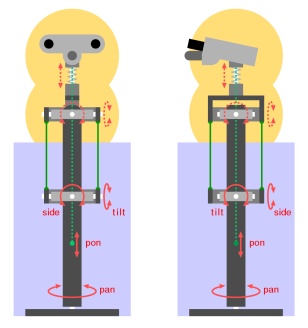
As illustrated above, "tilt" and "side" are driven by the pair of gimbals (one inside the belly of Keepon and the other below it), which are connected by four vertical wires. When the lower gimbal is actuated by motors, the same movement apears at the upper gimbal. While, "pan" is driven by rotating the body and the inner strucutre (the motors, PCBs, and the tangled cables you see in the picture above), and "pon" is actuated by pulling down a wire that goes through the spine (the vertical support in the center of Keepon) and by a spring in the neck that pops up the body.
The table blow describes the motion range, actuator specification, and final reduction ratio (after the actuator output; therefore, the total reduction ratio will be, for instance, 67.49×3.0). For "pon", we here use an arbitrary unit (say, "percent") for describing the linear motion of approximately 15mm stroke; 100 means full shrink. Note that positive direction is (1) to the right for "pan" and "side", and (2) to the floor for "tilt" and "pon".
| mnemonic | range (deg) |
motor/ratio | final ratio |
|---|---|---|---|
| tilt | −40…40 | maxon RE13 1.5W, GP13A 67.49 | 3.000 |
| pan | −180…180 | maxon RE13 3W, GP13A 67.49 | 3.000 |
| pon | 0…100 | maxon RE13 1.5W, GP13A 67.49 | |
| side | −25…25 | maxon RE13 1.5W, GP13A 67.49 | 3.000 |
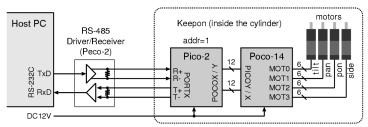
Each of the motors has an encoder (either 16ppr or 256ppr) and is controlled by a motion controller Pico-2 and a motor driver Poco-14. A host PC sends a motor command (with a goal position, velocity, acceleration) to Pico-2 through a serial commuication line (RS-485).
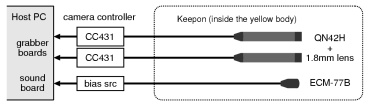
Keepon has two cameras for eyes and a microphone for ears (but monaural and mounted in the nose). The cameras are Elmo's QN42H (color CCD, 410K pixels) with 1.8mm lens (approx. horizontally 120deg, vertically 90deg). The microphone is SONY condensor microphone ECM-77B. These visual and auditory sensors are to be connected directly to the host PC, being independent from the connection for motor control.
Under construction. For details of the software running on Pico-2, please take a look at ClayBot description.