私の興味の中心は〈他者に対する想像力〉にあります.人間性の本質ともいえるこの能力が,他者とのコミュニケーションを可能にし,生物としての〈ヒト〉を社会的存在としての〈人間〉にしているのでしょう.この能力は,どのようなメカニズムによって実現されているのでしょうか.この能力は,進化的にも発達的にも,どのようなプロセスを経て人間に備わったのでしょうか.
これらの疑問を解き明かすために,最近は〈ロボット〉〈子どもの発達〉〈コミュニケーション障害〉などに興味をもっています.どうすればロボットが〈他者に対する想像力〉を獲得し,人間との真のコミュニケーションを実現できるのか,子どもはどのようにこの能力を発達させていくのか,この発達はどのような場合に障害をもち,それに対してどのような支援が可能なのか.これらを探求していきたいと思います.
生物として生まれた〈ヒト〉はとても無力な存在ですが,家庭やコミュニティのなかで養育者やほかの人たちとの関わりを深めていき,やがて言語や文化を担った社会的な存在としての〈人間〉になっていきます.この発達プロセスを特徴づけるのが,〈他者に対する想像力〉,つまり共感的コミュニケーション能力の質的・量的な変化です.
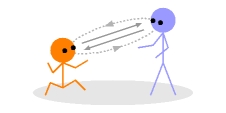
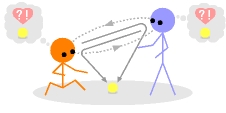
子どものコミュニケーション,とくに母子間(主たる養育者と子どものあいだ)のインタラクションは,アイコンタクト(見つめあい)やそれに伴う表情や声のやりとりに始まり,やがて指さしや共同注意(同じ対象を見ること)による注意のやりとりへと,コミュニケーションを深めていきます.注意対象を同じように知覚し,その対象に向けられた情動を参照しあうことで,子どもと養育者はたがいの存在や対象との関わりを共同化していきます.このような営みのなかで,共感的コミュニケーションが育まれていくのでしょう.
現在,CareBots プロジェクト で,このようなコミュニケーション発達を観察・分析・モデル化することを進めています.そこでは,乳幼児の自発的コミュニケーションを観察するためにも,また構築した発達モデルを表現・評価するためにも,次項にある〈ロボット〉が重要な役割を担っています.
おもな論文・著書──
- 小嶋 秀樹・高田 明: 社会的相互行為への発達的アプローチ──社会のなかで発達するロボットの可能性, 人工知能学会誌, Vol.16, No.6, pp.812-818, 2001.
- Kozima Hideki, Akira Ito: From joint attention to language acquisition, J. Leather, Jet van Dam (eds.), Ecology of Language Acquisition, Amsterdam: Kluwer Academic Publishers, pp.65-81, 2003.
子どものコミュニケーション発達を観察・モデル化するために,さまざまなインタラクティブ=ロボットを開発しています.その開発コンセプトは『子どもから自発的なコミュニケーション行動を引きだす〈身体〉』です.現在までに,〈子ども型ロボット Infanoid〉(右の写真)と〈ぬいぐるみロボット Keepon〉(左の写真)などをデザイン・製作しました.

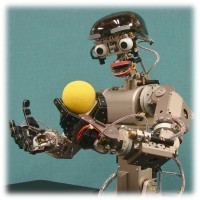
〈子ども型ロボット Infanoid〉(インファノイド)は,3〜4歳児とほぼ同じ大きさ(座高480mm)の上半身ヒューマノイド(人間型ロボット)です.おもに幼児期から学童期の子どもたちとのインタラクションを想定してデザインしました.唇や眉などによる情動の表出,視線や指さしなどによる注意の表出,そして何かに手を伸ばす・何かを手でつかむなどによる意図の表出が可能です.子どもたちが,自発的に情動・注意・意図などを Infanoid に帰属させ,〈心をもったエージェント〉としての Infanoid と遊んでもらうことをねらっています.
〈ぬいぐるみロボット Keepon〉(キーポン)は,おもに乳児期から幼児期の子どもたちと,安全なインタラクションができるようにデザインしました.高さ120mm・直径80mmのシリコンゴムでできたダンゴ型の身体にできることは,(1) 注意の表出:顔(つまり視線)を人物や対象物に向けることと,(2) 情動の表出:身体を左右あるいは上下に揺すり,楽しさや興奮といった心の状態を表現することだけです.Keepon も何かを見たり喜んだりできることを,子どもたちに直観的に感じとってもらうことをねらっています.
また,これらロボットのために開発した制御コンピュータやモータドライバなどを,さまざまなロボットや装置を実現するための〈ロボット素材 ClayBot〉(クレイボット)として公開する準備を進めています.
おもな論文・著書──
- Kozima Hideki: Infanoid: A babybot that explores the social environment, K. Dautenhahn, A. H. Bond, L. Cañamero, B. Edmonds (eds.), Socially Intelligent Agents: Creating Relationships with Computers and Robots, Amsterdam: Kluwer Academic Publishers, pp.157-164, 2002.
- Kozima Hideki, Marek P. Michalowski, Cocoro Nakagawa: Keepon: A playful robot for research, therapy, and entertainment, International Journal of Social Robotics, Vol.1, No.1, pp.3-18, 2009.
コミュニケーションは双方向的な行為のやりとりです.ロボットにアイコンタクトや共同注意の能力やその発達プロセスを実装しただけでは片手落ちで,そのロボットに人間(とくに子ども)がどのように関わろうとするのかを観察することも不可欠です.この観察から,(1) ロボットに欠けていた(あるいは過剰な)機能や形態が明らかになるでしょうし,また (2) 子どもの発達そのものをより詳細に調べることができるでしょう.


現在進めているインタラクション観察から明らかになりつつあるのは,子どもたちがロボットとの関係を(時間経過とともに・発達年齢とともに)ダイナミックに変化させていくプロセスです.最初,子どもたちは動くモノとしてロボットを捉えていますが,ロボットの視線・表情・身ぶりなどから,子どもたちは自律的な主体(=生命性)をロボットのなかに発見し,知覚し応答するシステムとしてロボットを理解するようになります.やがて子どもたちは,ロボットの視線・表情・身ぶりなどが,子ども自身の行為に随伴している(時間的・空間的な関連がある)ことに気づいていき,ロボットとの関係(注意や情動のつながり)を深めていきます.こうして子どもたちはロボットとの共感的コミュニケーションへと入っていくのでしょう.
おもな論文・著書──
- 小嶋 秀樹: 赤ちゃんロボットからみたコミュニケーションのなりたち, 発達, Vol.24, No.95, pp.52-60, 2003.
- Kozima Hideki, Cocoro Nakagawa, Hiroyuki Yano: Can a robot empathize with people?, International Journal "Artificial Life and Robotics", Vol.8, pp.83-88, 2004.
科学研究・技術開発は,個々人の幸せのため・人が集う社会のためにあるべきです.そのためにも,研究者自身が〈現場=フィールド〉に入り,そこでのニーズを汲みとり,〈現場〉のなかで要素技術=シーズを発想・開発・評価していくことが重要だと考えています.

現在,以下の〈現場〉で,ロボットを使った〈コミュニケーション=ケア〉の可能性を探索しています.子どものコミュニケーション能力の発達サポートや,高齢者のコミュニケーション能力の維持・改善サポートに,Keepon をはじめとするロボットが果たせる・果たすべき役割を明らかにしたいと考えています.
- 療育施設: 発達に遅れをもつ子どもたち(おもに2〜4歳)とロボットのインタラクションを観察・分析しています.お母さんや保育士さんとの遊びのなかで子どもたちが見せるロボットへ関わり方とその長期的な変化はさまざまですが,たんなる障害名(「自閉症」など)を越えた,その子らしさ・その子の発達の道すじを物語ってくれます.このデータを療育サポート・子育てサポートに役立てたいと考えています.
- 保育園: おもに健常の子どもたち(おもに2〜4歳)とロボットのインタラクションを観察・分析しています.友だちや保育士さんとのさまざまな遊びのなかで,社会的インタラクションが実践され,子どものコミュニケーション能力=社会的スキルが発達していく〈現場〉から,保育サポート・子育てサポートにロボットを活用していく可能性を探索しています.
- 介護施設: おもに認知症にともなうコミュニケーション障害をもった高齢者とロボットのインタラクションを観察・分析します.ロボットとの直接的なやりとりだけでなく,ロボットが共通話題となって対人コミュニケーションが促進され,コミュニケーション能力の維持・改善につながることを期待しています.
おもな論文・著書──
- Kozima Hideki, Cocoro Nakagawa, Yuriko Yasuda: Children-robot interaction: a pilot study in autism therapy, Progress in Brain Research, Vol.163, 2007.
- 小嶋 秀樹, 仲川 こころ, 安田 有里子: ロボットに媒介されたコミュニケーションによる自閉症療育, 情報処理, Vol.49, No.1, pp.36-42, 2008.
ほかにも研究の興味は尽きません.たがいに強くつながった興味もあれば,あまり関連のない興味もあります.ここにその一部を紹介します.
共感(empathy)とは,相手の立場にたって相手の知覚や情動などの心理状態を想像することです.おそらく〈他者に対する想像力〉のベースとなるものでしょう.この能力,とくに他者の痛みへの共感に興味をもっています.その認知メカニズムと発達プロセスを解明し,人からロボットへの痛みの帰属,ロボットから人への痛みの帰属を実現したいと考えています.
相手を共感的に理解しようとするには,相手にも〈心〉があると想定することが必要となります.相手の身体動作を観察したとき,そこに〈心〉の存在を想定するかどうかで,その解釈は質的に異なるものになるでしょう.他者に〈心〉を見いだす認知メカニズムを明らかにして,人から〈心〉を帰属されるロボット,人に〈心〉を帰属できるロボットを実現したいと考えています.
模倣には,相手の身体動作を再現すること(mimicking),行為の結果(報酬獲得など)を再現すること(emulation),そして目に見える身体動作と結果の裏にある意図を再現すること(imitation)などがあります.このように模倣にはいくつかの質的に異なる種類がありますが,それぞれについて,模倣の認知メカニズムと発達プロセスを解明し,人をまねることでさまざまな行動を獲得していくロボットを実現したいと考えています.
模倣(とくに imitation)をとおして,個々人による発明・発見がすみやかに集団内に伝染・定着し,世代を越えて蓄積されていくことで,人間のもつ高度な言語や文化(科学技術・社会制度など)が形成されたと考えられます.〈模倣〉とそれによる〈コトバと文化の獲得〉は,人間を他の生物種から区別する特徴です.これらを可能にする認知メカニズムを,ロボットを使って解明したいと考えています.
共感覚(synesthesia)とは,ある感覚モダリティ(たとえば聴覚)での刺激が別の感覚モダリティ(たとえば視覚)での知覚を不随意的に引き起こす現象です.共感覚は,成人では数千人にひとりという稀な現象ですが,だれでも生後3カ月頃までのあいだは共感覚的な──モダリティ未分化(amodal)な──知覚スタイルをもっているという仮説があります.この共感覚期がある場合とない場合で,人間の認識はどのように変わるのかに興味をもっています.