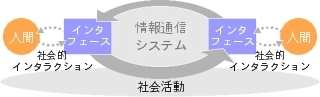
情報を生産するのも消費するのも最終的には人間です.情報通信のクオリティは人間とシステムをつなぐインタフェースに大きく依存します.コミュニケーションが社会活動の手段(あるいは社会活動そのもの)である以上,それを支える情報通信インタフェースも人間との社会的インタラクションを指向したものに進化していくでしょう.
社会性をもった情報通信インタフェースを実現するために,私たちは〈子どもの発達〉と〈ロボット〉に注目しています.これが CareBots プロジェクトの特徴であり,新しさでもあります.
生物として生まれた〈ヒト〉は,家庭やコミュニティのなかで,ひとりの社会的な存在である〈人間〉へと育っていきます.最初は反射的に環境に応じることしかできませんが,やがて他者との関わりのなかで,心の状態(意図や感情など)をやりとりできるようになっていきます.心の状態をやりとりし,たがいに行動を調整しあうことで,他者との協調(ときには競争)にもとづく社会活動に入っていくのです.
このような社会的発達をロボットで再現できれば,社会性をもったインタフェース,つまり仲間のひとりとして家庭や職場のなかで私たちと共生できるインタフェースが実現可能になるはずです.子どものコミュニケーション発達をロボット上に〈再現〉するアプローチと,何らかの社会的応答ができるロボットに子どもがどのように関わるのかを〈観察〉するアプローチ,これらを行き来することで,ヒトおよびロボットにおけるコミュニケーション能力の成り立ちが明らかになるでしょう.

コミュニケーションの本質とは何でしょうか.CareBots プロジェクトを始めるまで,それは言語であると私たちは考えていました.この目から見える世界,身体で感じる世界を,意味ある単位に分節し,それらの存在や相互関係を命題として表現できる言語は,たしかにコミュニケーションや思考の重要な道具となるでしょう.しかし,音声認識・文法解析・意味処理といったさまざまな技術を組み合わせても,人間レベルのコミュニケーション能力をコンピュータに与えることはできませんでした.コンピュータの〈コトバ〉は,意図や感情に裏打ちされたものではなく,辞書的な意味に対応づけられたシンボルの列にすぎなかったのです.命題情報は伝達できたのですが,心は伝わらなかったのです.
私たちの日常的なコミュニケーションの本質は,コトバによる命題のやりとりではなく,むしろその裏側で行われる〈心のさぐりあい〉にあるのでしょう.なにげないコトバのやりとりでも,その命題情報を伝達する裏側で,『私のこと気に入ってくれたかしら』とか『ほんとはオレ怒ってるんだぞ』といった〈心のさぐりあい〉をしています.コトバのやりとりはコミュニケーションの一手段にすぎません.コミュニケーションの究極の目的は,相手の心の状態を読みとる,あるいは変化させることなのです.心に相互アクセスすることがコミュニケーションであり,その手段は見つめあうことでも触れあうことでも構いません.
相手の心にアクセスするための第一歩は,相手と自分をとりまく状況を,相手と同じように捉えることです.相手と同じものを見て,同じ音を聞いて,その場の〈状況〉を共有できれば,相手がその〈状況〉をどのように感じとっているのかを共感的に理解することができるでしょう.
このような〈状況共有〉をシステムとユーザのあいだで実現するのが〈状況共有インタフェース〉です.ユーザの位置や物の配置といった物理的な状況だけでなく,ユーザの注意(視線や指さし)や情動(声の抑揚や表情の変化)といった身体的な状況を共有することで,ユーザが何を知覚しているのか,それをどのように評価しているのかといった,心理的な状況を共有すること──すなわちコミュニケーション──への可能性がひらけます.〈状況共有インタフェース〉によって,ユーザが何を欲しているのか,何を知っているのか,何をしようとしているのかを,ユーザの立場にたって捉えることが可能になるでしょう.そのとき,情報通信システムは,ユーザの日常生活のなかに有機的に埋め込まれるのです.