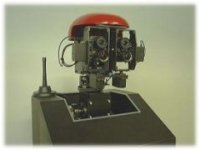
1996年の暮れ,Infanoid 1号は〈アクティブ=ビジョン=ヘッド〉として生まれました.2号機は1997年の春に完成しました.どちらも,左右の〈眼球〉に望遠レンズと広角レンズをつけたモノクロ CCD カメラをもち,これらの〈眼球〉をラジコン用サーボで駆動しています.サーボの制御には 68HC11 を利用し,視覚情報処理・行動制御などは Sun Ultra Sparc 2 (Solaris) で行なっています.Sun と 68HC11 のあいだは,シリアル接続(RS-232C)によって通信します.


Infanoid 1号機・Infanoid 2号機
1号機と2号機の違いは〈眼球〉の自由度配置にあります.1号機は,共通ティルト(上下)を先に駆動し,その次に左右独立のパン(左右)を駆動する方式(3自由度)です.これはステレオ画像処理には都合のよい方式です.2号機は,左右独立のパンを先に駆動し,それぞれ次に左右独立のティルトを駆動する方式(4自由度)です.水平線がつねに水平に見えるという点で,パターンマッチングには都合のよい方式です.(現行の Infanoid は1号機と同じ自由度配置を採用しています)
1998年に,首のパン(くびふり)とティルト(うなずき)の自由度を加えた3号機が完成しました.首は AC モータ+ハーモニックドライブで駆動されます.モータ制御には,もうひとつの 68HC11 を利用しています.ヘッドの構造は2号機とほぼ同じです.
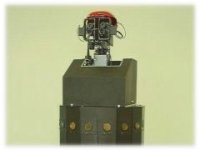
Infanoid 3号機・Infanoid 3号機+Nomad
また同じ 1998年に,Nomad という移動ロボットベースの上に,この3号機をマウントしました.Nomad は直径約50cm・高さ約100cmの円筒形の〈身体〉をもち,超音波センサ・赤外線センサ・衝突センサ・無線 LAN などを備えています.この身体の上に〈ヘッド〉を載せることで,Infanoid をすこしだけヒトらしくすることができました.移動能力をもった Infanoid は,この3号機 + Nomad だけです.
2000年の夏に,子どもサイズの上半身ヒューマノイド,Infanoid 4号が完成しました.この4号機の設計には,全体のバランスや各部品の干渉をチェックするために,3次元CAD(SolidWorks)を利用しています.(それまでは Draw 系のソフトウェアで設計図を書いていました)
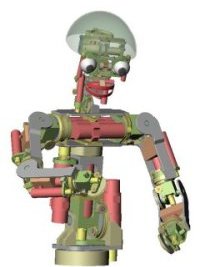

4号の設計図・4号の実機(未完成)
この4号機では,小型の制御コンピュータとモータドライバ(いずれも40mm×60mm)を身体各所に配置し,ケーブルの出入りを最小限に抑えました.制御コンピュータには前出の 68HC11 を使っています.また,ホストコンピュータには一般的な PC(Linux)を採用しました.視覚情報処理については「IMAP-VISION」という超並列 SIMD プロセッサを利用しています.256個の8ビットプロセッサが,1ライン=256ピクセルの画像を並列的に処理するという PCI ボードです.
この4号機には,当初 23の自由度をもたせました.片腕に6自由度,胴体に3自由度(腰パン・腰ティルト・胸パン),首に3自由度(首パン・首下ティルト・首上ティルト),頭部に5自由度(両眼ティルト・右眼パン・左眼パン・上唇・下唇)を配置しています.上下の唇を除いて,すべてワイヤによって動力を伝達しています.


眉つき4号機・眉つき4号機の頭部
2001年の初夏,Infanoid 4号に眉がつきました.左右対称の動きしかできませんが,眉の内端と外端を独立に上下させることで,眉の上げ下げ・ハの字や逆ハの字への傾けなどができます.この眉つき4号機(25自由度)は,大阪で開催された「ロボフェスタ関西2001」(2001年 7月20〜29日,グランキューブ大阪)に出展され,たくさんの方々に見ていただきました.
2002年の夏,より洗練された子ども型ヒューマノイド,Infanoid 5号が完成しました.5号機の特徴は,出っぱりの少ないスリムな身体と,5本の指をもったハンドです.このハンドには,2つの自由度(人さし指を曲げ伸ばし・他の4本指をまとめて曲げ伸ばし)を与えただけですが,指さしやバイバイなどの社会的ジェスチャの表出や,ボールやオモチャを握ることなどが可能になりました.また,特殊なハードウェアに頼っていた視覚情報処理を,すべて PC(Linux)上のソフトウェアで実行できるようにしました.
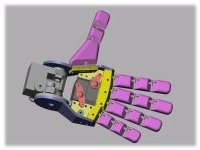

2自由度のハンド(設計図)・Infanoid 5号機
2004年からは,Infanoid 6号機を心理実験などに活用しています.外観は5号機とほどんど変わりませんが,身体各所に配置した制御コンピュータとモータドライバが一新されました.制御コンピュータは,旧版と同じサイズですが,プロセッサに SH2(7046)を採用し,飛躍的に性能が向上しました.モータドライバのHブリッジに STS の L6204D および L6201PS を採用し,小型化・高機能化を実現しました.また,ホスト PC との通信には RS-485 規格を採用し,より高速で安定した通信ができるようになりました.この6号機が現行版 Infanoid です.
Infanoid 5号機と6号機からは,実験やデモの目的にあわせて,さまざまな派生型を開発・活用しました.そのひとつは,デスクトップでの実験のためのヘッドです.初期の〈アクティブ=ビジョン=ヘッド〉に戻ったわけですが,表情の豊かさ・注意のわかりやすさなどが格段に改善されています.また,このヘッドを子ども型の胴体モックアップに搭載し,各種イベントや展示場などでのデモに活用しています.(パーカー・ジーンズなどはユニクロで調達しました.)


デスクトップ=ヘッド(5号)・モックアップつきヘッド(5号)
Infanoid は,実験やデモのために運搬することを想定して設計されています.運搬するときは,Infanoid をフレームの内部に収めることができます.実験やデモのときは,このフレームがテーブルとなり,その上に Infanoid をマウントします.フレームの後部に LCD モニタを取りつけ,画像処理の様子を表示することができます.また,インタラクション実験の場合,被験者の年齢にあわせて,テーブルの高さを約 2/3 にすることもできます.


運搬中の Infanoid(5号)・デモ中の Infanoid(5号)
また,とくに小さな子どもを相手にするときは,Infanoid にスモックを着せることもありました.関節部分に手や指を入れないようにするためです.現在は,アルミや樹脂で作ったカバーを関節部分に取りつけることで,指や手を入れられないようにしています.

スモックを着た Infanoid(5号)
これ以外にも,目的に合わせて,さまざまな派生型 Infanoid を開発・活用してきました.どれひとつをとっても全く同じものはありません.これからも,さまざまな Infanoid が登場することでしょう.