2002年の春,コミュニケーション能力の初期発達を調べるために,乳幼児との安全なインタラクションが可能なロボットの開発がスタートしました.開発のコンセプトは,Infanoid と同様,『子ども(とくに赤ちゃん)から自発的なコミュニケーション行動を引きだす〈身体〉』ですが,相手が乳幼児であるため,安全性や直観的な理解しやすさを優先したデザインをめざします.
構想の初期段階は『もし,ぬいぐるみが動いて,注意や情動のやりとりができたら…』という素朴な想像からスタートしました.たまたま研究室にあった赤い犬のぬいぐるみ──Infanoid の共同注意実験で使っていたもの──を取りあげて,その小ささ (座高100mm)・可愛らしさを保ったまま,2つのビデオカメラや8個のモータなどを仕込めないだろうかと考えたのです.早速 CAD で設計してみたのですが,高さ200mmになってしまい,もともとの可愛らしさは失われてしまいました.これでは乳幼児にとって魅力的なロボットにはなりません.


参考にしたぬいぐるみ・ボツにした設計図
ゼロからやりなおしです.赤ちゃんとの注意と情動のやりとりをするための機能に絞り込み,それだけをカタチにしていくことにしました.注意を表出するには,指向性をもった感覚器を備えることと,その感覚器の方向を動かせることが必要です.そこで球や円柱といった回転対称体をベースとし,その〈前面〉に眼や鼻といった顔要素を配置します.そして顔要素の方向を上下左右に動かすようにしました.また,情動の表出については,口や眉毛でも,手や足でもなく,身体全体を使うことにしました.たとえば,興奮したときは身体をはずませる,楽しいときは身体を左右に揺らす,恐いときは震えるといった動作です.(『ムーミン』のニョロニョロをイメージしてください)

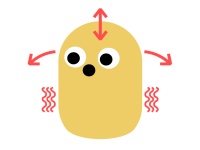
注意の表出機能・情動の表出機能
これら必要な機能から,ロボットのデザインが浮かび上がってきました.赤ちゃんにも安全なように,身体を弾性体で成形します.その身体全体を柔らかく変形させることで,注意や情動を表出するようにします.身体の柔らかさと安全性を最大限に引きだすために,身体を上下に分けてクビレをつくり,モータや制御装置などを身体の外(床下)に配置します.最後に CAD で全体のバランスをチェックして完成したものが,現在の Keepon のカタチです.

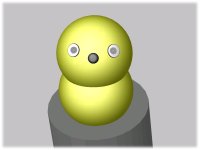
くびれを入れた身体・CAD で最終チェック
カタチが決まったので,つぎに駆動メカニズムをデザインします.注意の表出に2自由度 (前後屈・水平回転),情動の表出に2自由度 (左右傾動・上下伸縮) を与えます.また,これら自由度を小刻みに動かすことによって〈震え〉を表現することにします.
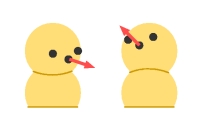

注意の表出(2自由度)・情動の表出(2自由度)
モータや制御装置などを円筒型の容器に入れ,そのフタの上にロボットの身体をのせるようにします.問題は,モータと身体のあいだの動力伝達です.水平回転は,駆動メカニズムを含めた身体全体を回転させることで,また上下伸縮は,頚椎の長さをワイヤとスプリングで伸縮させることで実現できそうです.前後屈(うなずき)と左右傾動(くびかしげ)は,どちらも回転中心が身体内部(ヘソのあたり)にくるため,何らかのリンク機構が必要になります.ボールジョイントは候補のひとつですが,市販品では大きさと動作範囲の点で難があります.そこで2つの回転軸を直交させたジンバルを身体内部と容器内部に用意し,それらの間を4本のワイヤで連結することにしました.
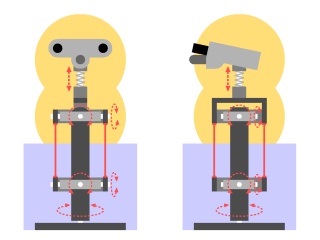
Keepon の駆動メカニズム(模式図)
ちょうどマリオネット(操り人形)のように,下(容器内部)のジンバルを駆動させると,同じ動きが上(身体内部)のジンバルに再現されるわけです.これなら身体内部に比較的大きなスペースがとれるため,姿勢によって,また外からの力によって,身体はやわらかく変形するでしょう.
この駆動メカニズムに,制御コンピュータ Pico-2 とモータドライバ Poco-14 を取りつけたものが,つぎの写真にあるような Keepon の実機です.実際には,上部にはシリコンゴムの外皮 (高さ約120mm・直径約80mm),下部には金属性の円筒カバー (高さ150mm・直径110mm) が装着されますが,説明のために取り外してあります.

Keepon の内部構造
上側のジンバルがよく見えます.下側のジンバルには前後屈を駆動するモータが水平配置されています.左右傾動はタイミングベルトを介して下部のモータによって駆動されます.また上下伸縮は,支柱のなかを通したワイヤを介して,下部のモータによって駆動されます.
顔のあたりに2本のビデオカメラ(ELMO QN-42H + 1.8mm lens)が見えます.ちょっと見えにくいのですが,マイクロフォン(SONY ECM-77B)もあり,外皮にあけた鼻の穴に装着されるようになっています.頭の上にある突起は,外皮(頭皮)と連結する部分で,頭部骨格が上下伸縮・前後屈・左右傾動したとき外皮にその力を伝えます.4つのモータが下部に格納され,うち1つは内部機構全体を左右に旋回させます.通信線 (RS-485)・カメラケーブル2系統・マイクケーブル1系統・電源線 (DC12V) を束ね,円筒容器の底部でゼンマイ状に巻くことで,左右旋回時のケーブルのたるみを吸収しています.
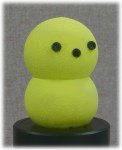

メカ完成当時の Keepon(左) と 現行版の Keepon(右)
最後に,3次元造形装置(液体樹脂を感光させて造形する機械)で作った眼や鼻のピースを取りつけることで,眼は(ビデオカメラではなく)眼らしく,鼻は(マイクロフォンではなく)鼻らしくなりました.出発点だったぬいぐるみの可愛さを失わずに,注意や情動のわかりやすい表出を可能とし,同時に柔らかさと安全性を達成できたと思います.これが現行版 Keepon です.