Movado は Pico-2 上で動作するモータ制御ソフトウェアです.Infanoid や Keepon に装着された Pico-2 は,この Movado によってモータを制御しています.
Movado は,ホスト PC からシリアル通信線をとおして指令を受けとり,最大 4 つのエンコーダ付き DC モータ(加えて最大 4 つのラジコン用サーボ)を制御します.ひとつのシリアル通信線に最大 31 個の Pico-2(これを「ノード」と呼びます)を接続でき,最大 124 個の DC モータを制御できるので,多自由度のロボットを比較的簡単に構成することができます.PC との接続およびモータとの接続については ClayBot 仕様 のページをご覧ください.
Movado は,Pico-2 の BIOS インタフェース 上に C 言語によってプログラムされています.コンパイルの方法やフラッシュ=メモリへの書き込みについては ソフトウェア開発環境 / フラッシュ=メモリへの書き込みかた のページをご覧ください.
- ダウンロード: 制御ソフト Movado
このページでは,PC からの指令プロトコルを解説します.この指令プロトコルによって,PC からシリアル通信線をとおして,複数のモータを自在に制御することができます.Movado についてのより詳しい情報は,Movado のしくみ のページをご覧ください.
Movado への指令は 6 バイトのパケット(packet)の形をとります.下図の左端に縦に並べられたのが 6 バイトのパケットです.パケットの先頭バイト(1st byte)のみ MSB(most signficant bit = bit7)が 1 となり,後続するバイトの MSB は 0 となります.この MSB のパターンによって,シリアル通信におけるパケットのフレーム同期を保証しています.
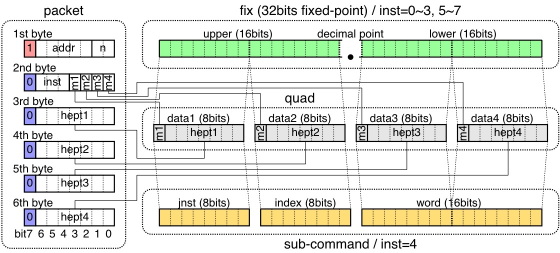
パケットは,アドレス(addr)・モータ番号(n)・命令(inst),そして 4 バイト引数(quad)から成ります.
アドレス(addr)は 5 ビット(0〜31)で,シリアル通信線に接続されたノード(Pico-2)を識別します.アドレスは Pico-2 基板上のディップスイッチ SW1〜5 で設定します.SW5=on SW4=off SW3=off SW2=on SW1=off ならば,addr=0x12 (18) となります.同じのシリアル通信線上に接続されたノードは,それぞれ異なるアドレスを持たなければなりません.addr=0x1f (31) は「同報アドレス」として予約されているため,Pico-2 のアドレスとして設定することはできません.なお,後述するように,アドレスは3つのクラス(0x00〜0x07, 0x08〜0x0f, 0x10〜0x1e)に分かれ,クラスごとにエンコーダ分解能の自動設定が行なわれます.
モータ番号(n)は 2 ビット(0〜3)で,Pico-2 に接続された最大 4 つのモータ MOT0〜3 を識別します.アドレスとモータ番号をつなげた 7 ビットによって,シリアル通信線上の特定のモータを識別することができます.(ラジコン用サーボに関する副命令 move_rcs・setacc_rcs・setvel_rcs・setpos_rcs に関しては,この n によって 4 つのラジコン用サーボ RCS0〜3 を識別します.)
命令(inst)は 3 ビット(0〜7)です.指令パケットを受け取った Movado は,この命令を実行します.その詳細は後述します.
4 バイト引数(quad)は第 3〜6 バイトから取り出されますが,本来あるべき 4 つの MSB がすべて別の場所に移動されているため,復元作業が必要となります.これらの MSB は,第 2 バイト(2nd byte)の下位 4 ビット(m1〜4)に格納されています.そこで,第 3〜6 バイトの下位 7 ビット(hept1〜4)に,それぞれ m1〜4 を MSB として加え,4 バイト(data1〜4)の列を得ます.これが 4 バイト引数(quad)となります(上図の右側中段).
この 4 バイト引数(quad)は,命令(inst)に応じて異なる意味づけを受けます.まず inst=0〜3, 5〜7の場合,data1(上位)と data2(下位)を連結した上部 16 ビット(upper)を整数部とし,data3(上位)と data4(下位)を連結した下部 16 ビット(lower)を小数部とする 32 ビット固定小数点データ(fix)となり(上図の右側上段),これを引数として命令(inst)が実行されます.一方,inst=4(sub)の場合は,data1 を副命令(jnst),data2 をインデックス(index),data3(上位)と data4(下位)を連結した 16 ビットをワードデータ(word)からなる副指令(sub-command)が実行されます(上図の右側下段).副指令の詳細は後述します.
32 ビット固定小数点データ(fix)は,16 ビットの整数部と 16 ビットの小数部によって,およそ -32768〜32768 を範囲とする値をとることができます.表現可能な最小ステップは 2-16(およそ 0.000015)です.ホスト PC 上の浮動小数点(double など)から 32 ビット固定小数点(fix)への型変換は,以下の C コードを参考にしてください.(ホスト PC での int が 32 ビットでない場合は,若干の変更が必要になります.)
typedef int fix;
fix double2fix (double d) {
return (fix) (d * 65536);
}
double fix2double (fix f) {
return f / 65536.0;
}
パケットを受け取った Movado は,そのアドレス(addr)が自分のアドレス(または同報アドレス 0x1f)である場合,それを指令(command)として実行します.inst=0〜3 をもつ指令(表中でセルが赤)は,モータを駆動したり,速度・加速度などを設定するためのものです.inst=5〜7 をもつ指令(表中でセルが青)は,Movado のモータの状態(現在の位置・速度・加速度など)を問い合わせるためのもので,Movado から PC に返信パケットが送信されます.inst=4 の場合は,引数に埋め込まれた副指令(sub-command)を実行します.
| 命令名 | inst:3 | fix:32 / quad:32 | |
|---|---|---|---|
| upper:16 | lower:16 | ||
| move | 0 | pos [rad] | |
| setacc | 1 | acc (≥ 0) [rad/s2] | |
| movac | −acc_int (< 0) [rad/s2] | pos_int [rad] | |
| setvel | 2 | vel (≥ 0) [rad/s] | |
| movel | −vel_int (< 0) [rad/s] | pos_int [rad] | |
| setpos | 3 | pos [rad] | |
| sub | 4 | sub-command | |
| getacc | 5 | (1), (2) [rad/s2] | |
| getvel | 6 | (1), (2) [rad/s] | |
| getpos | 7 | (1), (2) [rad] | |
|
(1) 指令パケットでは,どんな値でもよい. (2) 返信パケットには,ここに値が格納される. |
|||
-
move 命令(inst=0)
n で指定されたモータを,台形速度制御によって位置 pos (fix) [rad] まで回転させます.それ以降,モータはその位置を保持するようになります.このときの加速度(の絶対値)は,後述する setacc 命令によって設定されたものが,また最高速度(の絶対値)は,後述する setvel 命令によって設定されたものが使われます. -
setacc 命令(inst=1 かつ acc ≥ 0)
n で指定されたモータの move・movel 命令における加速度の絶対値を acc (fix) [rad/s2] に設定します. -
setvel 命令(inst=2 かつ vel ≥ 0)
n で指定されたモータの move・movac 命令における最高速度の絶対値を vel (fix) [rad/s] に設定します. -
setpos 命令(inst=3)
n で指定されたモータを,最大限のパワーで位置 pos (fix) [rad] まで回転させます.それ以降,モータはその位置を保持するようになります. -
sub 命令(inst=4)
quad に記述された副指令(sub-command)を実行します.jnst ≥ 0x80 の場合,Movado は返信パケットを PC に送信します.個々の副指令については後述します. -
getacc 命令(inst=5)
n で指定されたモータの台形速度制御のために設定された加速度の絶対値 acc [rad/s2] を,元のパケットの fix 領域に格納して PC に返信します. -
getvel 命令(inst=6)
n で指定されたモータの現在の速度 vel [rad/s] を,元のパケットの fix 領域に格納して PC に返信します.この速度 vel は実測値(アンチエイリアシング後)であり,負の値はマイナス方向(CCW方向)の速さを表わします. -
getpos 命令(inst=7)
n で指定されたモータの現在の位置 pos を,元のパケットの fix 領域に格納して PC に返信します.
このほかに,move 命令とよく似た movac・movel 命令があります.movac 命令は,加速度(の絶対値)を設定した上で,また movel 命令は,最高速度(の絶対値)を設定した上で,move 命令を実行します.この加速度・最高速度の設定は一時的なもので,後続する move・movac・movel 命令には影響しません.
-
movac 命令(inst=1 かつ fix<0)
n で指定されたモータを,台形速度制御によって位置 pos [rad] まで回転させます.それ以降,モータはその位置を保持するようになります.位置 pos は,整数部を pos_int とし小数部を 0 とする 32 ビット固定小数点データとして与えられます.このときの加速度(の絶対値)acc は,−acc_int を整数部とし 0 を小数部とする 32 ビット固定小数点データ [rad/s2] として与えられます.したがって,movac 命令での upper:16 は常に負の値をとります.また最高速度(の絶対値)は,setvel 命令によって設定されたものが使われます. -
movel 命令(inst=2 かつ fix<0)
n で指定されたモータを,台形速度制御によって位置 pos まで回転させます.それ以降,モータはその位置を保持するようになります.位置 pos は,整数部を pos_int とし小数部を 0 とする 32 ビット固定小数点データとして与えられます.このときの最高速度(の絶対値)vel は,−vel_int を整数部とし 0 を小数部とする 32 ビット固定小数点データ [rad/s] として与えられます.したがって,movel 命令での upper:16 は常に負の値をとります.また加速度(の絶対値)は,setacc 命令によって設定されたものが使われます.
なお,ここでいう「位置」とは,エンコーダが連結されたモータ単体の出力軸上の回転位置 θ [rad] となります.モータ単体を出力軸側から見たとき時計回り(CW)となるのがプラスの方向です.「速度」とは,エンコーダが連結されたモータ単体の出力軸上の回転角速度 ω [rad/s] となります.また,「加速度」とは,エンコーダが連結されたモータ単体の出力軸上の回転角加速度 ω' [rad/s²] となります.いずれも Movado の内部では「32 ビット固定小数点」によって表現されています.
inst=4 の場合,4 バイト引数(quad)を「副指令(sub-command)」と解釈し,それを実行します.副指令は,8 ビットの副命令(jnst),8 ビットのインデックス(index),16 ビットのワード(word)からなります.
なお副指令には,addr・n で指定されたモータを対象とする「モータ指令」(下表で「m」)と,addr で指定されたノードを対象とする「ノード指令」(下表で「N」)があります.ノード指令の場合,モータ番号 n は無視されます.
(1)パラメタを読み書きするための副指令群
Movado には,下表のように,各モータごとの位置・速度・加速度などの値を格納する 32 ビット固定小数点パラメタや,各モータごとの状態フラグなどの値を格納する 16 ビットパラメタがあります.
| 32 ビット固定小数点パラメタ(主なもの) | ||
|---|---|---|
| 名前 | index | 説明 |
| MIN | 0x10 | min position [rad] (set by do_min) |
| MAX | 0x11 | max position [rad] (set by do_max) |
| KP | 0x12 | gain for proportional control (def: 2.0) |
| KI | 0x13 | gain for integral control (def: 40.0) |
| KD | 0x14 | gain for differential control (def: 0.05) |
| VMP | 0x15 | motor power voltage [V] (def: 12.0) |
| 16 ビットパラメタ(主なもの) | ||
|---|---|---|
| 名前 | index | 説明 |
| CAMOD | 0x00 | submode in CAM (0 for completion) |
| MMFLG | 0x04 | flag for do_min/max (0 for completion) |
これらパラメタには,下表にあげる副指令をとおしてアクセスすることができます.set 系の命令(セルが赤)はパラメタの値を書き換えます.get 系の命令(表中でセルが青)はパラメタの値を読み出し,返信パケットを PC に送信します.
| 命令名 | N/m | jnst:8 | index:8 | word:16 |
|---|---|---|---|---|
| set_upper | m | 0x00 | index | upper |
| set_lower | N | 0x00 | 0xff | lower |
| set_word | m | 0x01 | index | word |
| get_upper | m | 0x80 | index | (1), (2) |
| get_lower | N | 0x80 | 0xff | (1), (2) |
| get_word | m | 0x81 | index | (1), (2) |
|
(1) 指令パケットでは,どんな値でもよい. (2) 返信パケットには,ここに値が格納される. |
||||
-
set_upper 命令(jnst=0x00 かつ index<0xff)
n によって指定されたモータについて,index で指定された 32 ビット固定小数点パラメタを上書きします.書き込まれるデータは,上部 16 ビットが upper となり,下部 16 ビットには set_lower 命令によって登録された下部バッファの値が入ります. -
set_lower 命令(jnst=0x00 かつ index=0xff)
16 ビットデータ lower を下部バッファに書き込みます.この下部バッファは,すべてのモータ(n=0〜3)で共有されます.通常,まず set_lower 命令によって下位 16 ビットのデータを仮登録し,続いて set_upper 命令によって特定の index に対応する 32 ビット固定小数点パラメタを書き換えることになります. -
set_word 命令(jnst=0x01)
n によって指定されたモータについて,index で指定された 16 ビットパラメタを,与えられた 16 ビットデータ word によって上書きします. -
get_upper 命令(jnst=0x80 かつ index<0xff)
n によって指定されたモータについて,index で指定された 32 ビット固定小数点パラメタを読み出し,その上部 16 ビットを元のパケットの word 領域に格納して PC に返信するとともに,下部 16 ビットを下部バッファに書き込みます.この下部バッファは,すべてのモータ(n=0〜3)で共有されます. -
get_lower 命令(jnst=0x80 かつ index=0xff)
下部バッファの値を元のパケットの word 領域に格納して PC に返信します.通常,まず get_upper 命令によって特定の index に対応する 32 ビット固定小数点パラメタの上位 16 ビットのデータを読み出し,続いて get_lower 命令によって下位 16 ビットを読み出します. -
get_word 命令(jnst=0x81)
n によって指定されたモータについて,index で指定された 16 ビットパラメタを読み出し,その値を元のパケットの word 領域に格納して PC に返信します.
(2)動作キャリブレーションのための副指令群
Movado はインクリメンタル型エンコーダ付きのモータの制御を想定しています.このエンコーダでは,出力軸の絶対位置(絶対回転角度)を直接的に得ることができません.出力軸に取り付けられた機構(たとえばロボットの腕)を動かし,その物理的な限界点を見つけることで,Movado 内部での論理的な位置と Movado 外部での物理的な位置とをリンクさせる必要があります.下表は,そのために必要となる副指令をまとめたものです.
| 命令名 | N/m | jnst:8 | index:8 | word:16 |
|---|---|---|---|---|
| set_zero | m | 0x7f | 0x00 | (1) |
| do_max | m | 0x7f | 0x05 | emg |
| do_min | m | 0x7f | 0x06 | emg |
| do_minmax | m | 0x7f | 0x07 | emg |
| do_minmaxcen | m | 0x7f | 0x08 | emg |
| do_minmaxmax | m | 0x7f | 0x09 | emg |
| do_minmaxmin | m | 0x7f | 0x0a | emg |
| (1) 指令パケットでは,どんな値でもよい. | ||||
-
set_zero 命令(jnst=0x7f かつ index=0x00)
n で指定されたモータについて,現在の位置を原点(位置 0)とします.モータは動きません. -
do_max 命令(jnst=0x7f かつ index=0x05)
n で指定されたモータについて,プラス(CW)方向の物理的な限界点まで回転させ,その限界点を 32 ビット固定小数点パラメタ MAX に記録します.set_vel によって設定された速度によってモータを等速回転させていき,モータの動きが emg [ms] 分以上の遅れを生じた場合,その位置を限界点とみなします.emg の値は試行錯誤をとおして見つけてください.多くの場合,emg の値として 100〜200 程度がよいでしょう.記録された限界点は,get_lower・get_upper 命令によって読み出すことができます. -
do_min 命令(jnst=0x7f かつ index=0x06)
n で指定されたモータについて,マイナス(CCW)方向の物理的な限界点まで回転させ,その限界点を 32 ビット固定小数点パラメタ MIN に記録します.詳細は do_max の項目を参照してください. -
do_minmax 命令(jnst=0x7f かつ index=0x07)
n で指定されたモータについて,最初に do_min を実行し,つぎに do_max を実行します.詳細は do_min・do_max の項目を参照してください. -
do_minmaxcen 命令(jnst=0x7f かつ index=0x10)
n で指定されたモータについて,最初に do_minmax を実行し,つぎに得られた両限界点の中点 (MIN + MAX) / 2 に移動し,最後にその中点で set_zero を実行します.中点への移動には,set_vel によって設定された速度を使います. 詳細は do_minmax・set_zero の項目を参照してください. -
do_minmaxmax 命令(jnst=0x7f かつ index=0x11)
n で指定されたモータについて,最初に do_minmax を実行し,つぎに得られたプラス方向の限界点 MAX で set_zero を実行します.詳細は do_minmax・set_zero の項目を参照してください. -
do_minmaxmin 命令(jnst=0x7f かつ index=0x12)
n で指定されたモータについて,最初に do_minmax を実行し,つぎに得られたマイナス方向の限界点 MIN に移動し,最後にその限界点で set_zero を実行します.限界点への移動には,set_vel によって設定された速度を使います. 詳細は do_minmax・set_zero の項目を参照してください.
動作キャリブレーション命令(do_max, do_min など)の実行終了は,16 ビットパラメタ MMFLG を読み出すことで検出できます.MMFLG の値が 0 以外であれば動作キャリブレーションの実行中,値が 0 であれば動作キャリブレーションの終了を意味します.
(3)ラジコン用サーボを制御するための副指令群
Movado は最大 4 台のラジコン用サーボを制御することができます.制御のしかたは,DC モータの場合との同じように,台形速度制御(move_rcs)と最大パワー制御(setpos_rcs)を選べます.
ラジコン用サーボの出力軸は,位置 0x2400 [count] のときほぼ中央となります.およそ 60 [count/deg] の割合で,−60〜60 [deg] 程度の動作範囲をカバーすることができます.たとえば,出力軸の絶対位置を −30 [deg] にするには,位置 0x1cf8 [count] を指定します.なおラジコン用サーボは出力軸の絶対位置を直接制御するので,動作キャリブレーションは不要です.
| 命令名 | N/m | jnst:8 | index:8 | word:16 |
|---|---|---|---|---|
| move_rcs | m | 0x70 | 0x00 | pos_rcs |
| setacc_rcs | m | 0x70 | 0x01 | acc_rcs |
| setvel_rcs | m | 0x70 | 0x02 | vel_rcs |
| setpos_rcs | m | 0x70 | 0x03 | pos_rcs |
-
move_rcs 命令(jnst=0x70 かつ index=0x00)
n によって指定されたラジコン用サーボ(RCSn)を,台形速度制御によって目標位置 pos_rcs まで回転させます.それ以降,ラジコン用サーボはその位置を保持するようになります.このときの加速度(の絶対値)は,後述する setacc_rcs 命令によって設定されたものが,また最高速度(の絶対値)は,後述する setvel_rcs 命令によって設定されたものが使われます. -
setacc_rcs 命令(jnst=0x70 かつ index=0x01)
n で指定されたラジコン用サーボ(RCSn)の move_rcs 命令における加速度を acc_rcs に設定します. -
setvel_rcs 命令(jnst=0x70 かつ index=0x02)
n で指定されたラジコン用サーボ(RCSn)の move_rcs 命令における最高速度を vel_rcs に設定します. -
setpos_rcs 命令(jnst=0x70 かつ index=0x03)
n で指定されたラジコン用サーボ(RCSn)を,最大限のパワーで位置 pos_rcs まで回転させます.それ以降,ラジコン用サーボはその位置を保持するようになります.
(4)その他の副指令群(主なもの)
| 命令名 | N/m | jnst:8 | index:8 | word:16 |
|---|---|---|---|---|
| reset | N | 0x7f | 0xff | (1) |
| get_report | m | 0xff | interval | count |
| (1) 指令パケットでは,どんな値でもよい. | ||||
-
reset 命令(jnst=0x7f かつ index=0xff)
addr で指定されたノードについて,すべての 32 ビット固定小数点パラメタと 16 ビットパラメタを初期化します. -
get_report 命令(jnst=0xff)
n で指定されたモータについて,interval [ms] ごとに count 回だけ,その各時点での現在の位置をパケット(getpos の返信パケットと同じ形式)の fix 領域に格納してをPC に返信します.
move 系命令(move・movac・movel および move_rcs)では,与えられた加速度 acc [rad/s2],最高速度 vel [rad/s] に従って,与えられた目標位置 pos [rad] までモータを回転させます.この制御方法は,一般に台形の速度プロファイルをもつようになるため,台形速度制御と呼ばれます.
move 系命令を受け取った Movado は,加速度 acc で加速し,最高速度 vel に達したら巡航状態に入り,適切なタイミングで加速度 −acc の減速に入り,目標位置 pos1 で停止するというものです.その速度(上図)と位置(下図)の変化を模式的に表わすと,次のようになります.
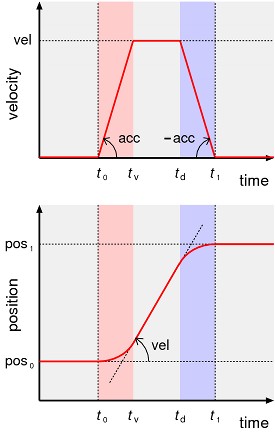
たとえば,時刻 t0 に move 系命令を受け取った場合,あらかじめ設定されていた(movac 命令の場合は明示的に与えられた)加速度 acc で加速しはじめます.これは等加速運動となるため,速度プロファイルは斜めの直線,位置プロファイルは放物線となります.
この速度の絶対値が,あらかじめ設定されていた(movel 命令の場合は明示的に与えられた)最高速度 vel に達した場合,それ以上の加速はぜずに,巡航状態(等速運動)に入ります.速度プロファイルは水平線,位置プロファイルは斜めの直線となります.なお,小さな加速度あるいは大きな最大速度が設定された場合,この巡航状態に達する前に(後述する)減速状態に入ることもあり,その場合の速度プロファイルは,台形ではなく二等辺三角形になります.
Movado は,一定の減速度(負の加速度 −acc)で目標位置 pos1 で停止(速度を 0 に)できるように,減速を開始する時刻 tdを計算します.つまり,速度プロファイルの台形(あるいは二等辺三角形)の面積が,目標位置までの移動距離(pos1−pos0)となるように,減速開始時刻を計算するわけです.この時刻 td に達したとき,Movado は減速を開始します.これは等減速運動となるため,速度プロファイルは斜めの直線,位置プロファイルは放物線となります.
最終的に,目標位置 pos1 で停止します.計算上の誤差のため,一発で目標位置に停止できないことがありますが,その場合は自動的に微調整を行ない,最終的に目標位置 pos1 で停止します.(ただし,計算上およびモータ制御特性上,わずかな誤差が生じることがあります.)
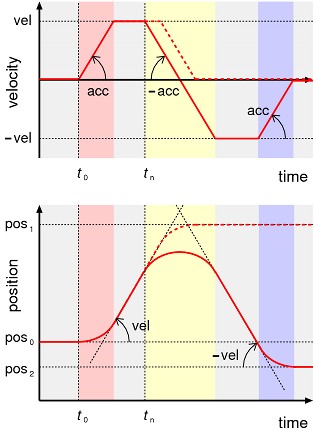
上の例では停止状態(速度 0)から台形速度制御を開始しましたが,そうでない場合でも move 系命令を実行することができます.たとえば,先行する move 系命令によって pos1 に向けて移動している最中に,新しい move 系命令によって別の目標位置 pos2 を与えることができます.すると Movado は,古い目標位置は忘れ,新しい目標位置 pos2 に向かって,台形速度制御を実行するようになります.その速度(上図)と位置(下図)の変化を模式的に表わすと,たとえば次のようになります.
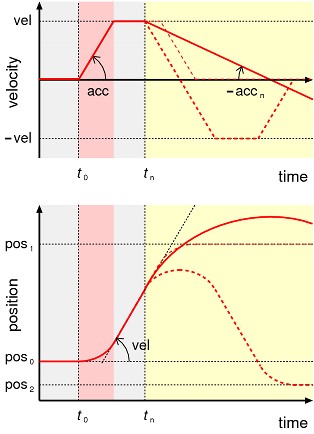
新しい目標位置を与えるとき,加速度や最高速度を変えることも自由にできます.ただし,大きな速度での移動中に小さな加速度 accn で新しい目標位置を与えた場合,いわばブレーキやアクセルの効きが悪い状態になるため,下図のように,目標位置に達するまで長い時間(と移動軌跡)が必要となります.この移動軌跡がモータ出力軸の動作範囲を越えてしまう可能性があるので,注意が必要です.
move 系命令を使って移動する場合,目標位置に達したことを検出したい場合があります.たとえば目標位置 pos1 に移動し,その位置で何らかの仕事(たとえば測位や写真撮影)をしてから,つぎの目標位置 pos2 に移動するような場合です.
このような場合は,get_word 命令を使って 16 ビットパラメタ CAMOD をチェックすることで解決できます.Movado は台形速度制御をしているあいだ,CAMOD に 0 以外の数値を格納します.台形速度制御が終了(目標位置でモータが停止)すると,Movado は CAMOD に 0 を格納します.
たとえば,目標位置 pos への move 系命令を送信したのち,この CAMOD パラメタを読み出す命令(sub/get_word)を送信し,その返信(パケットの word 部分に CAMOD の値が格納される)を受信することを 10〜100ms 程度の周期で繰り返します.CAMOD が 0 になった場合に繰り返しを終了すれば,確実に目標位置 pos が達成されたことを確認できます.
Movado では,設定したアドレスによって,上表のエンコーダ分解能に適合したパラメタ(エンコーダ係数 ERPC8・速度フィルタ係数 LPFA)が自動設定されます.(4 つのモータすべてについて同じパラメタが自動設定されます.)
| Pico-2 | 分解能/回転 | ERPC8 | LPFA |
|---|---|---|---|
| アドレス | [pulse, count] | [rad/count×28] | (フィルタ係数) |
| 0x00〜0x07 | 16, 64 | 25.133 | 0.0625 |
| 0x08〜0x0f | 200, 800 | 2.0106 | 0.2500 |
| 0x10〜0x1e | 256, 1024 | 1.5708 | 0.2500 |
使用するエンコーダに合わせて,適切な範囲からアドレスを選択するとよいでしょう.また,これらパラメタを set_upper・set_lower 命令によって上書きすることで,表にない分解能のエンコーダに対応することや,ひとつの Pico-2 に分解能の異なる複数のエンコーダを接続することが可能になります.なお,ERPC8 は整数部 8 ビット・小数部 24 ビットの固定小数点形式をとるため,エンコーダ分解能(rad/count)の実数値を 224 倍した値に設定してください.また,LPFA(32 ビット固定小数点形式)の値は,上表を参考にして,応答特性(とくにアンチエイリアシング効果の過不足)を見ながら決めてください.
| 32 ビット固定小数点パラメタ(補足1) | ||
|---|---|---|
| 名前 | index | 説明 |
| ERPC8 | 0x0f | encoder resolution [rad/count in s0824] |
| LPFA | 0x19 | coefficient of the velocity filter (LPF) |
Movado はモータを(巻線の焼損などから)保護するために,プラス方向・マイナス方向の物理的限界点から安全マージン(PMAR)だけ手前の位置に,動作限界点(MAX・MIN)を設定します.モータの目標位置 XPOS は,これら動作限界点の範囲(MIN ≤ XPOS ≤ MAX)に制限されます.
| 32 ビット固定小数点パラメタ(補足2) | ||
|---|---|---|
| 名前 | index | 説明 |
| PMAR | 0x0a | safe margin [rad] (def: 1.0) |
MAX の初期値は約 32768 [rad](0x7fffffff),MIN の初期値は −32768 [rad](0x80000000)となっています.動作キャリブレーション(do_max・do_min など)を実行することで,MAX・MIN の値は自動的に設定されます.また,PMAR の初期値は 1.0 [rad](0x00010000)となっています.いずれのパラメタも set_upper・set_lower 命令によって任意の値に設定することもできます.